
联系点亮

当前位置:首页 » 新闻中心 » 行业资讯 » 隧道雷视融合全息感知系统
隧道雷视融合全息感知系统
文章来源:未知责任编辑:管理员人气:发表时间:2023-09-20 16:15
项目简介
技术特点
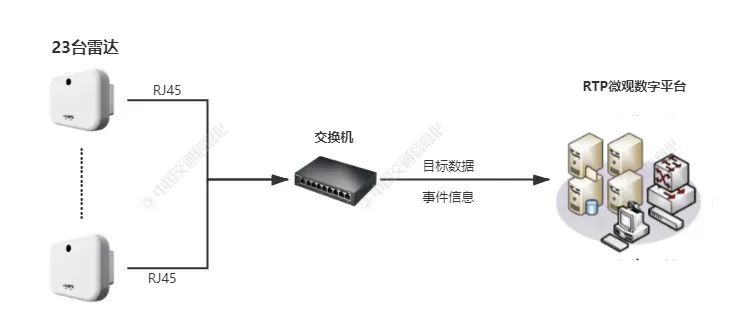
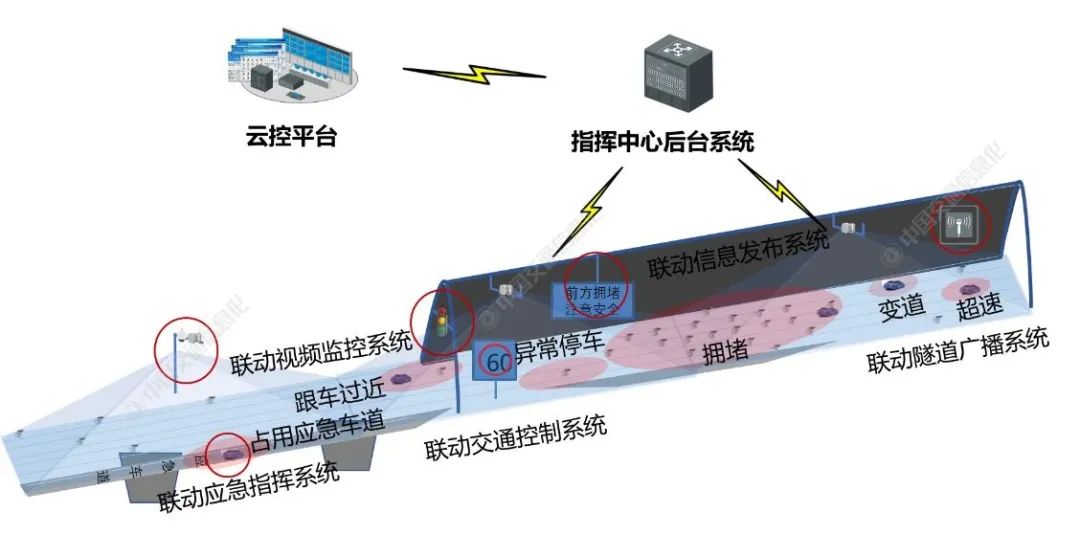
系统架构
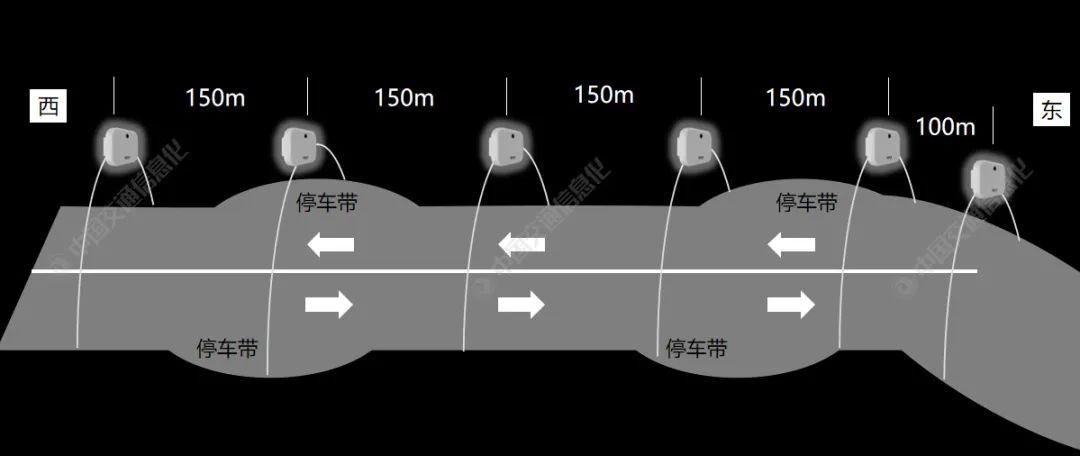
系统布设
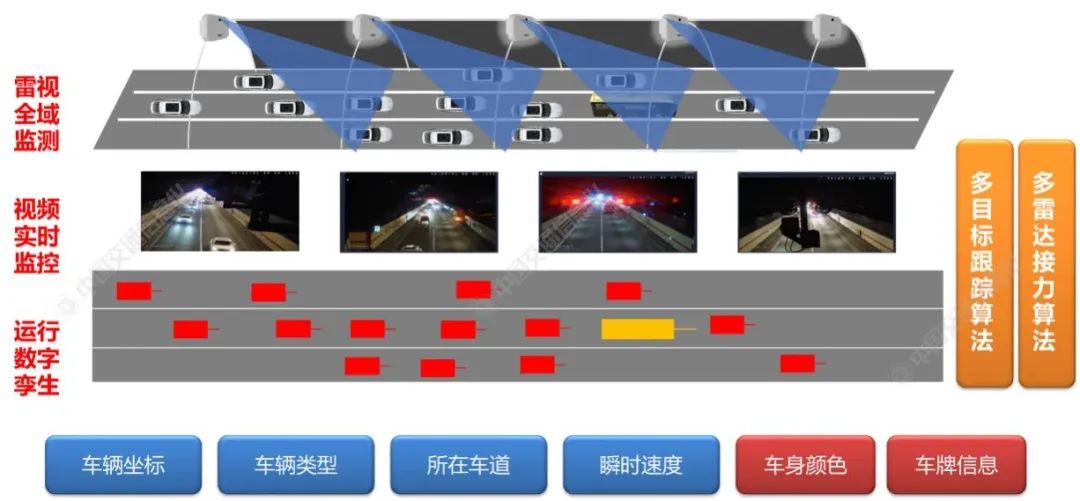
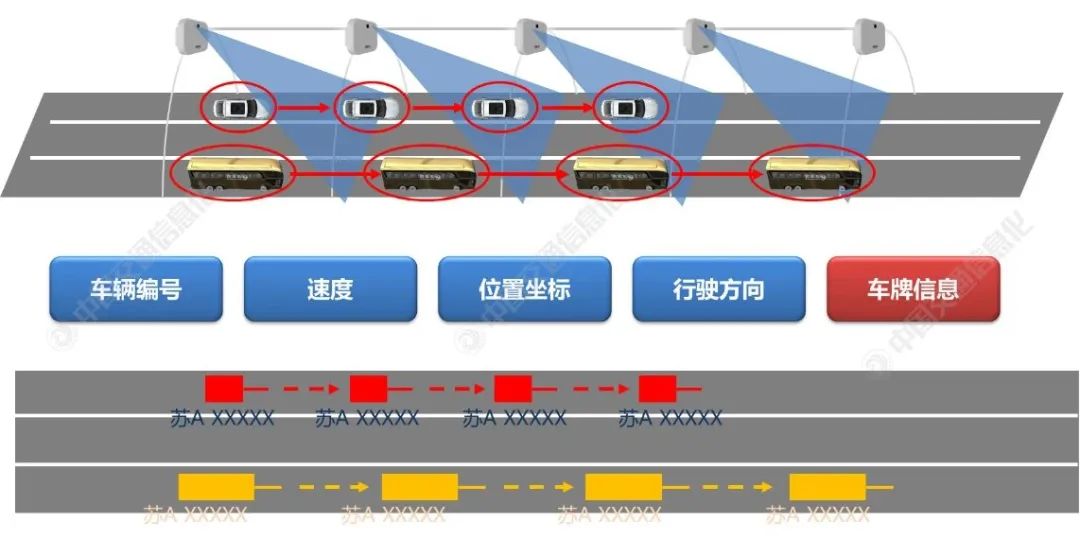
系统功能

主要设备
系统应用
下一篇:没有了 上一篇:2023全国高速公路智慧收费站技术研讨会在石家庄举行
